Kinematic Analysis
Markerless limb tracking and stride-level gait kinematics that quantify locomotor deficits and recovery after stroke using deep-learning pose estimation.
Overview
WHEEL WALKING VIDEO
- Constrain free behavior to steady, repetitive walking on a motorized wheel synced with miniscope recording.
- Track all four paws (and tail base) markerlessly with a DeepLabCut deep-learning pose model.
- Detect footstrikes and liftoffs from paw-position traces to segment individual strides.
- Quantify stride frequency and stride-to-stride variability (Dynamic Time Warping against a per-animal stereotyped stride).
- Compare gait across recovery (baseline → PD03 → PD27) and against infarct size and beam-test performance.
Limb Tracking
STILL IMAGE
XY POSITIONS
A DeepLabCut model labels each paw frame-by-frame; pooled positions reveal the consistent per-limb step cycle the kinematics are built on.
Stride Segmentation
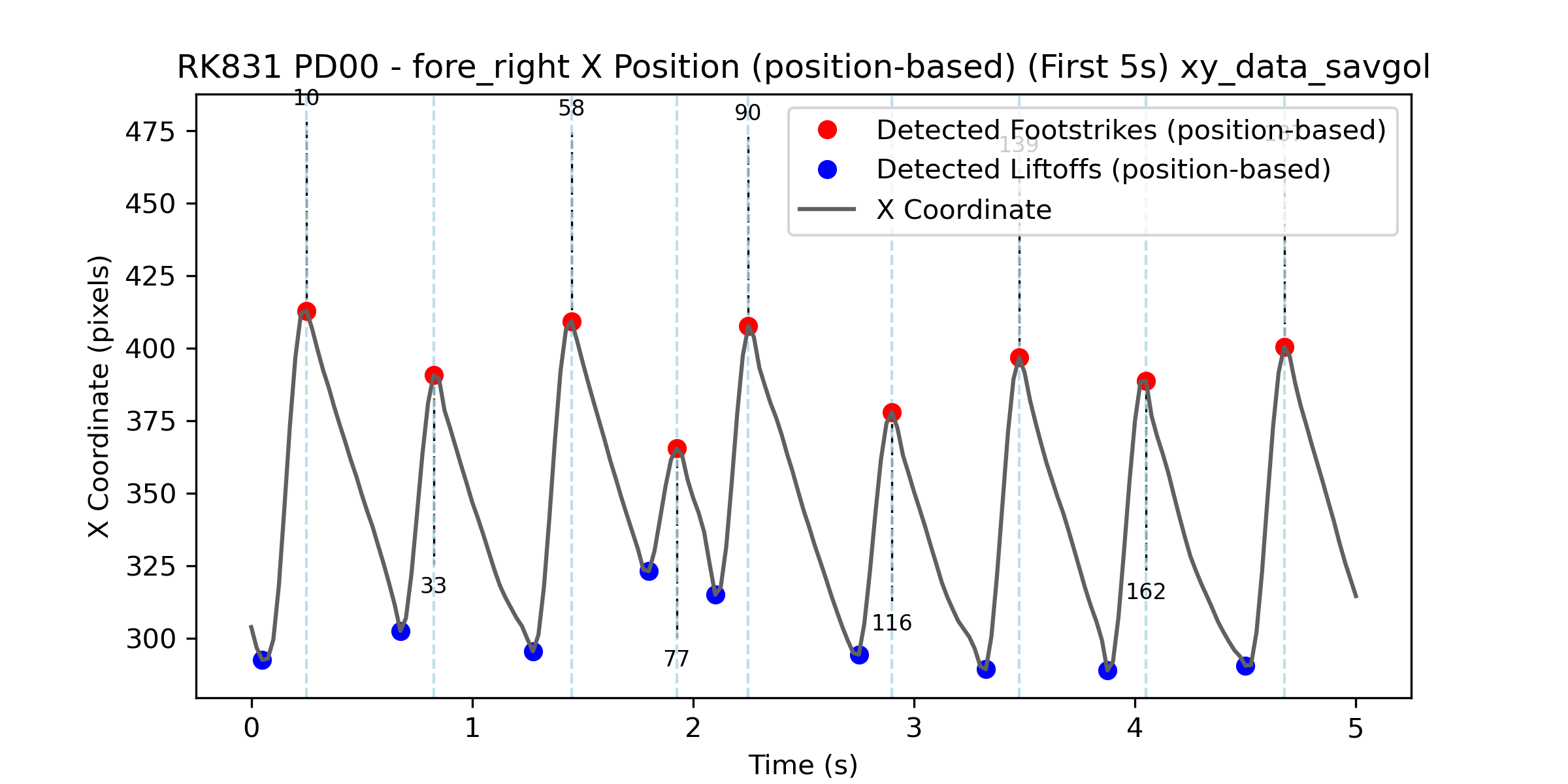
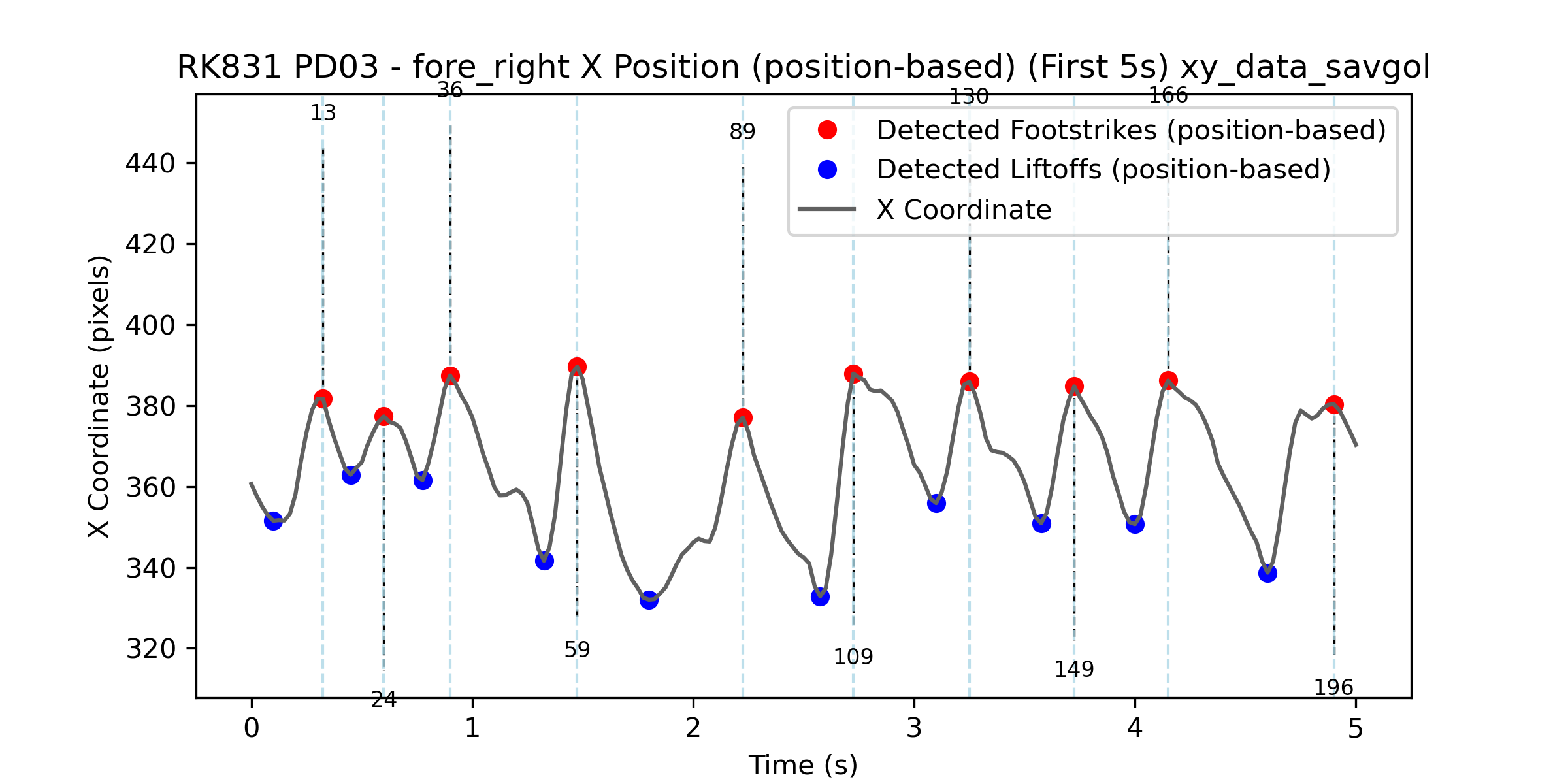
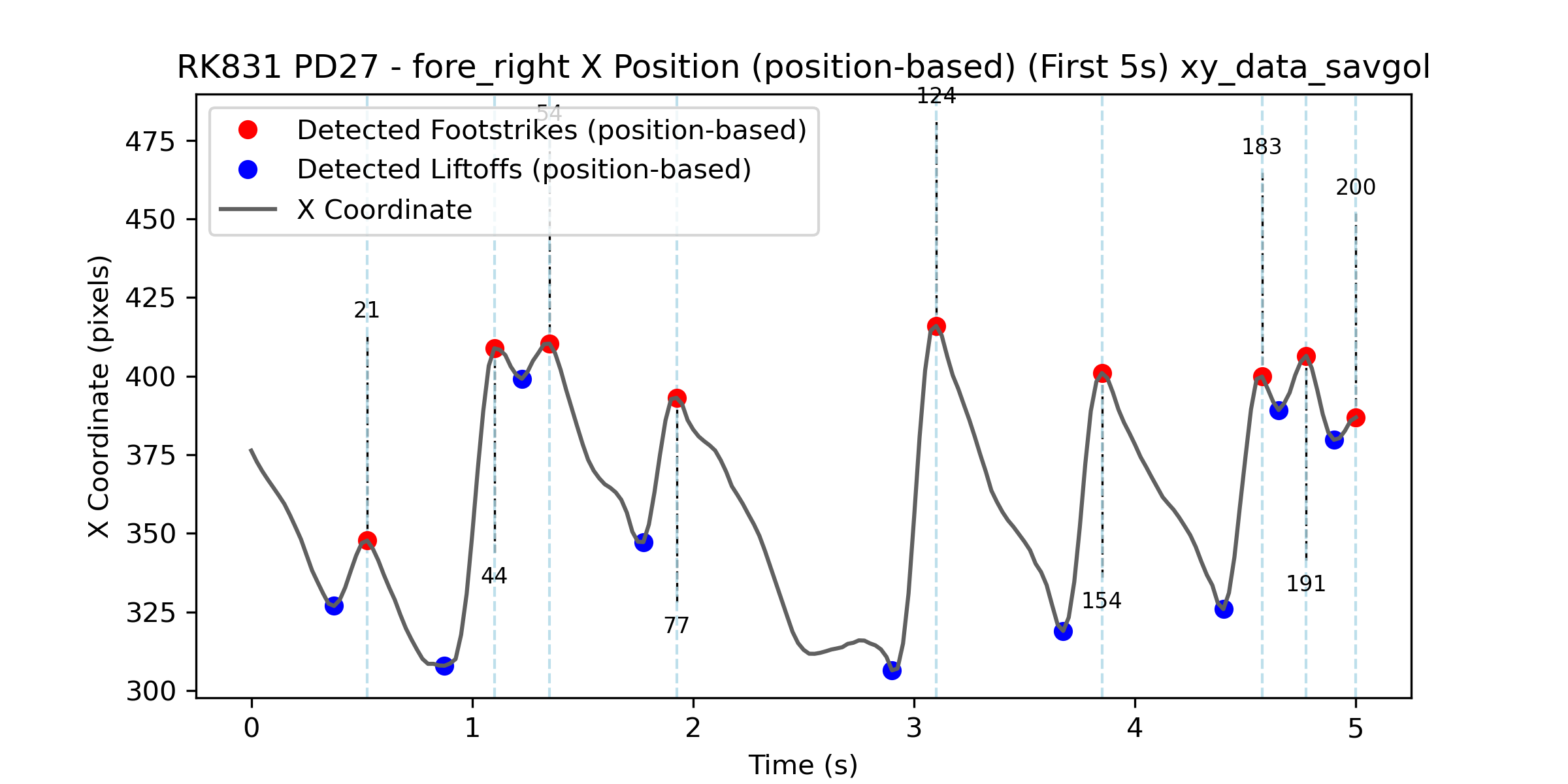
Footstrike (red) to footstrike defines one stride. Baseline steps are crisp and regular; after stroke the cycle flattens and destabilizes, partially re-emerging by PD27.
Stroke-Induced Stride Variability
STROKE DEFICIT PLOTS
Stride variability scales with infarct size and tracks beam-test recovery, capturing a gait dimension of deficit distinct from standard motor scores.